
شرکت، تحت مدیریت جناب آقای عبدی پور، در زمینه ارائه خدمات سرویس و نگهداری، بازرسی و مشاوره فعالیت مینماید.
محدوده فعالیت: تهران و حومه
جهت کسب اطلاعات بیشتر، با شمارههای ذیل تماس حاصل فرمایید:
دفتر: 02144652654
همراه: 09120276237
طبقه بندی موضوعی
-
پروژه ها
(۶۰) -
اخبار
(۳۴) -
گواهینامه ها
(۸) -
همایش ها
(۶) -
موتور آسانسور
(۲۷) -
تجهیزات داخل موتورخانه
(۶۵) -
تبلیغات
(۶) -
نمایشگاه
(۱) -
سیم بکسل ها
(۱۲) -
فلکه کششی و فلکه هرزگرد
(۱۲) -
ریل آسانسور
(۱۸) -
روغن کاری ریل
(۲) -
سرویس و نگهداری آسانسور
(۸۳)
-
محاسبات
(۷) -
بالابر
(۳) -
آسانسورهای خاص
(۱۰) -
برق
(۳۹) -
قطعات آسانسور
(۷۶) -
درب آسانسور
(۱۴) -
فضای مجازی
(۱) -
چاه آسانسور
(۱۷) -
کابین آسانسور
(۲۳) -
آسانسور و زلزله
(۱) -
روشنایی
(۱) -
حوادث آسانسور
(۳) -
آسانسور هیدرولیکی
(۲) -
تابلو فرمان آسانسور
(۳) -
درایو آسانسور
(۴) -
تجهیزات داخل تابلو فرمان آسانسور
(۲) -
تجهیزات داخل کابین آسانسور
(۹) -
براکت
(۷) -
لقمه آسانسور
(۳) -
تجهیزات داخل چاه آسانسور
(۹) -
نصب و راه اندازی آسانسور
(۱۸) -
کفشک اسانسور
(۱) -
کف کابین آسانسور
(۳) -
سیم بکسل ، سر بکسل ، گوه
(۱)
پربیننده ترین مطالب






روش تشخیص مکان کابین
روش های جدید
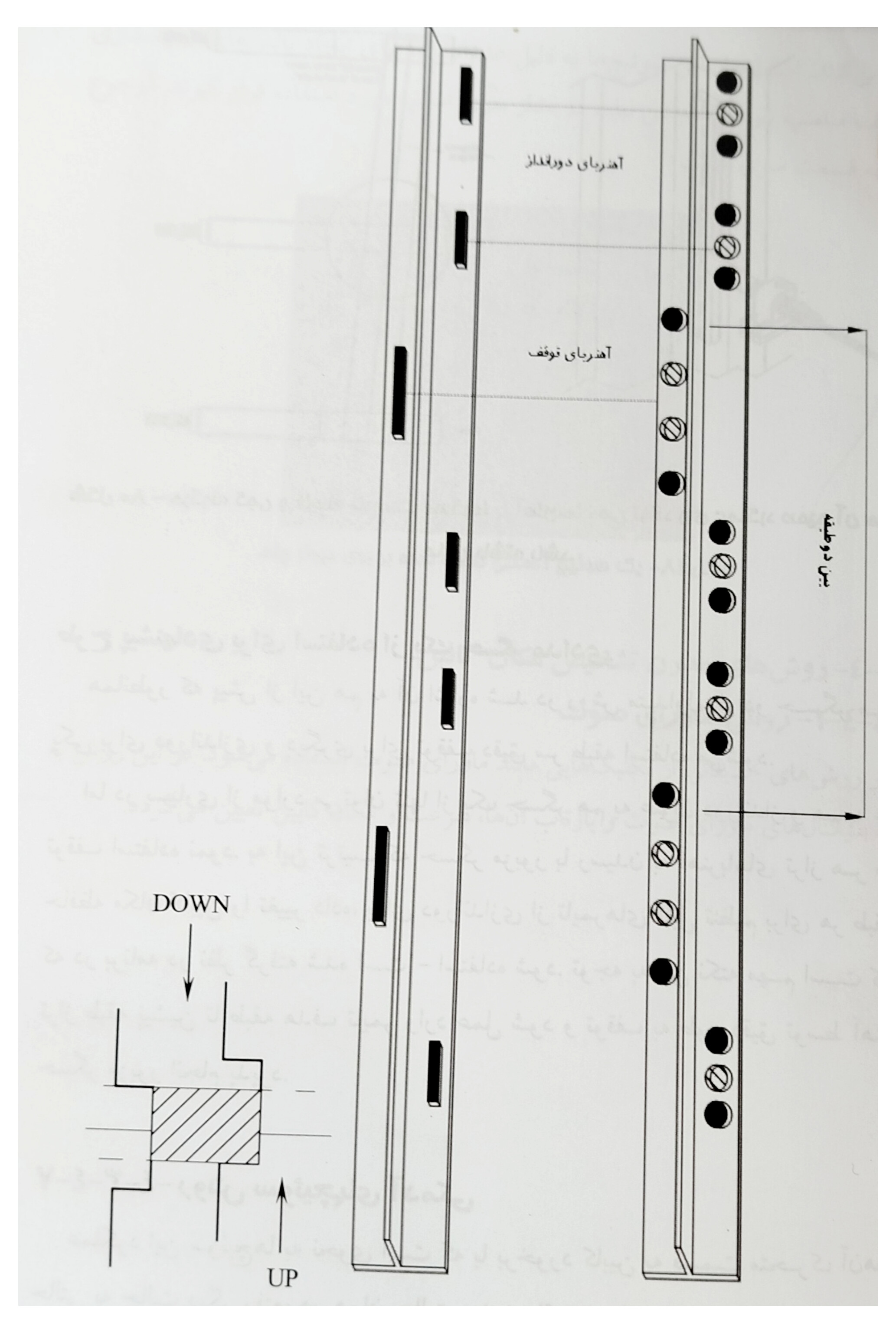
1. روش مگنت سوئیچ :
در این روش دو مگنت سوئیچ حساس به صفحات آهنی یکی برای تغییر سرعت و دیگری برای توقف سر طبقه مورد استفاده قرار می گیرد. صفحات آهنی موسوم به پرچم در طول مسیر حرکت کابین در چاه، در محل های معین نصب شده، از فاصله داخلی مگننت سوئیچ عبور کرده آن را تحریک می کن، در نتیجه پالس های مرود نیاز برای تشخیص مکان و کاهش سرعت و همچنین مکان دقیق توقف سر طبقه ایجاد می گردد. از معایب این روش میتوان به لختی عملکرد آن در سرعت های بالا، نا زیبا شدن چاه در آسانسورهای شیشه ای و خطر زیاد برای فرد ایستاده رو کابین به ویژه در مواردی که ایجاد چاه کوچک است ، اشاره نمود.
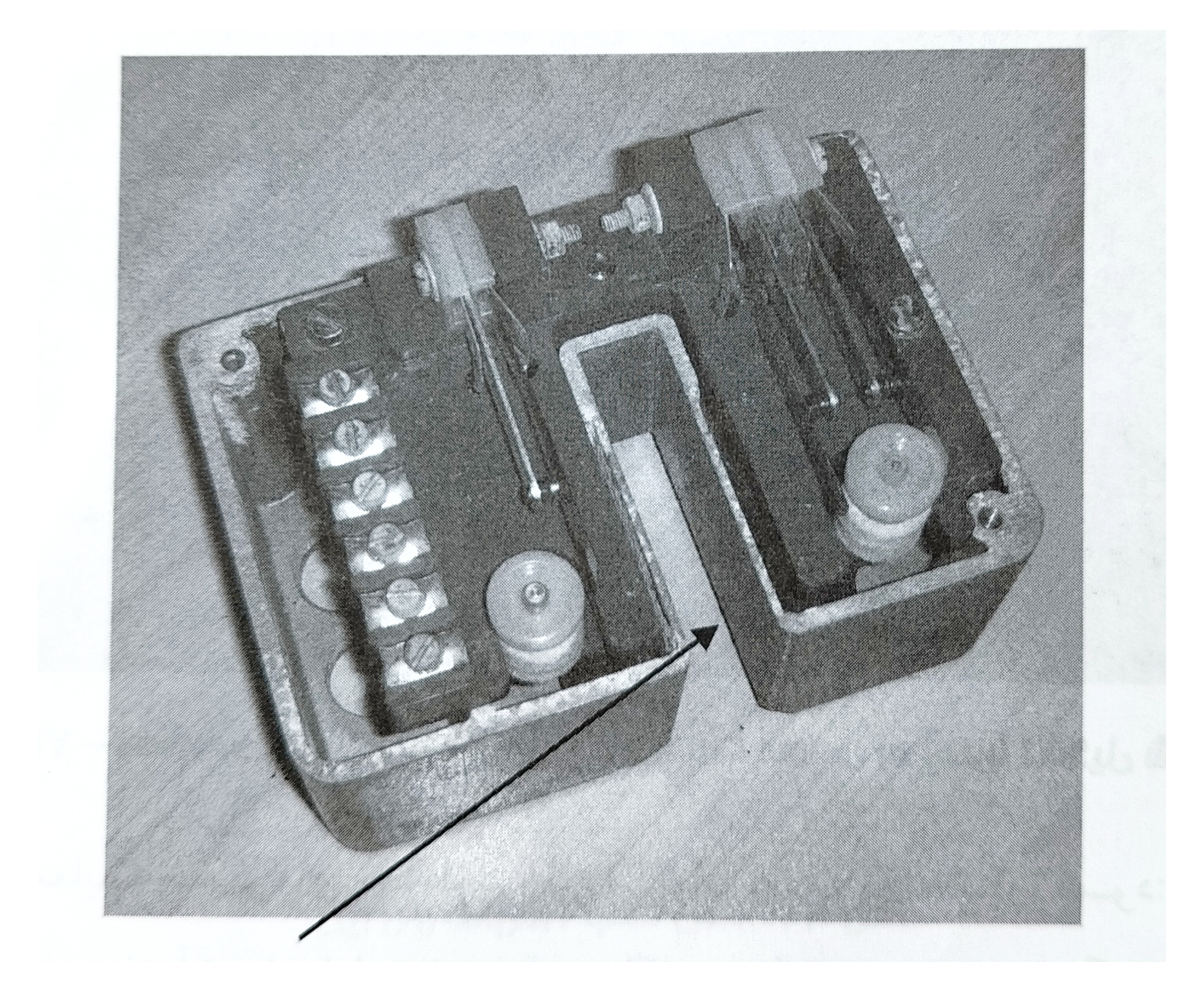
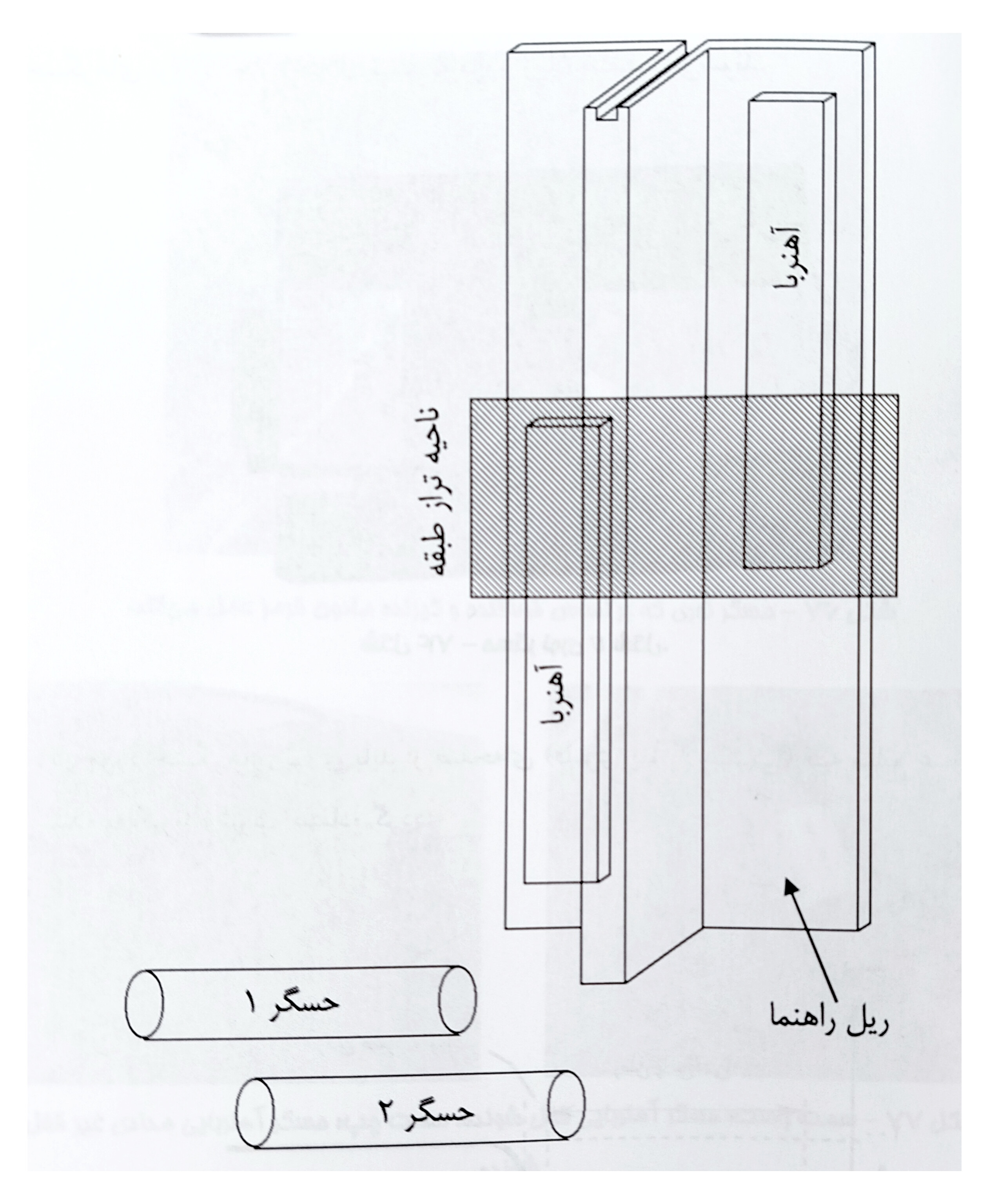
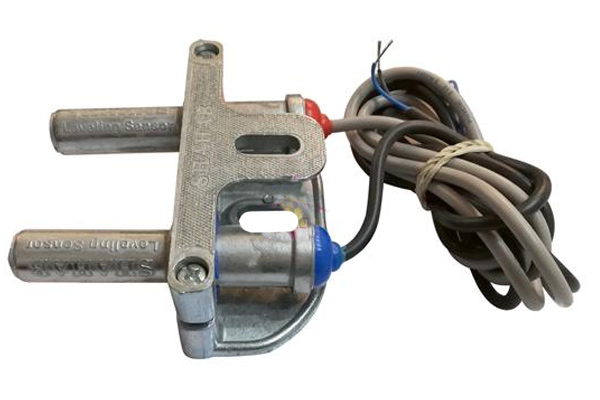
2. روش حسگر مدادی :
همانطور که در بالا اشاره شد معمولا از دو حسگر یکی برای تشخیص مکان کابین و دیگری برای توقف استفاده می شود. پالس های ایجاد شده توسط این حسگرها یز به وسیله تراول کابل به تابلو منتقل می گردد. روش دیگر به کمک دو حسگر آن است که هر دو برای دور اندازی و توقف عمل می کنند. بدین ترتیتب که اگر هر کدام ار حسگرها به تنهایی تحریک شوند به عنوان دور انداز عمل کرده، اگر باهم تریک شوند به عنوان توقف. این حسگرها میتوانند از نوع مدادی حساس به آهنربا یا از نوع حسگر نوری و ... باشند.

در مورد معیب حسگرهای مغناطیسی نیز میتوان به 3 نکته اشاره نمود :
1. به دلیل ساختمان آنها ، دارای سرعت عملکرد پایینی بوده ، در هنگام استفاده در آسانسورهای با سرعت بالا ( بیش از متر بر ثانیه ) دچار مشکل شده، باید از نوع دیگری که پر سرعت تر است استفاده شود.
2. در صورت وجود ترک در آهنرباها ، امکان ایجاد پالس های اضافی وجود دارد، که خود موجب ایجاد اختلال شمارش پالس های طبقات می شوند.
3. این حسگرها نسبت به شدت میدان حساس بوده در صورت کممتر یا بیشتر شدن فاصله هاشان تا سطح آهنربا، امکان عمل نکردن آن ها نیز وجود دارد.
3. روش حسگر نوری :
در این روش از تابش نور مادون قرمز توسط فرستنده و دریافت آن توسط گیرنده استفاده می شود.
یکی از معایب حسگرهای نوری ، حساسیت آن به نور محیط می باشد، به طوری که در برخی از پروژه ها که نورهای بازتابی در چاه آسانسور خیلی زیاد است، عملکرد این حسگرهای نوری دچار اختلال شده و به مرور زمان ضعیف می شوند. در مورد حسگرهای نوری باید از صفحه ای فلزی یا پلاستیکی که مانع عبور از فرستنده به گیرنده شود، استفاده گردد.

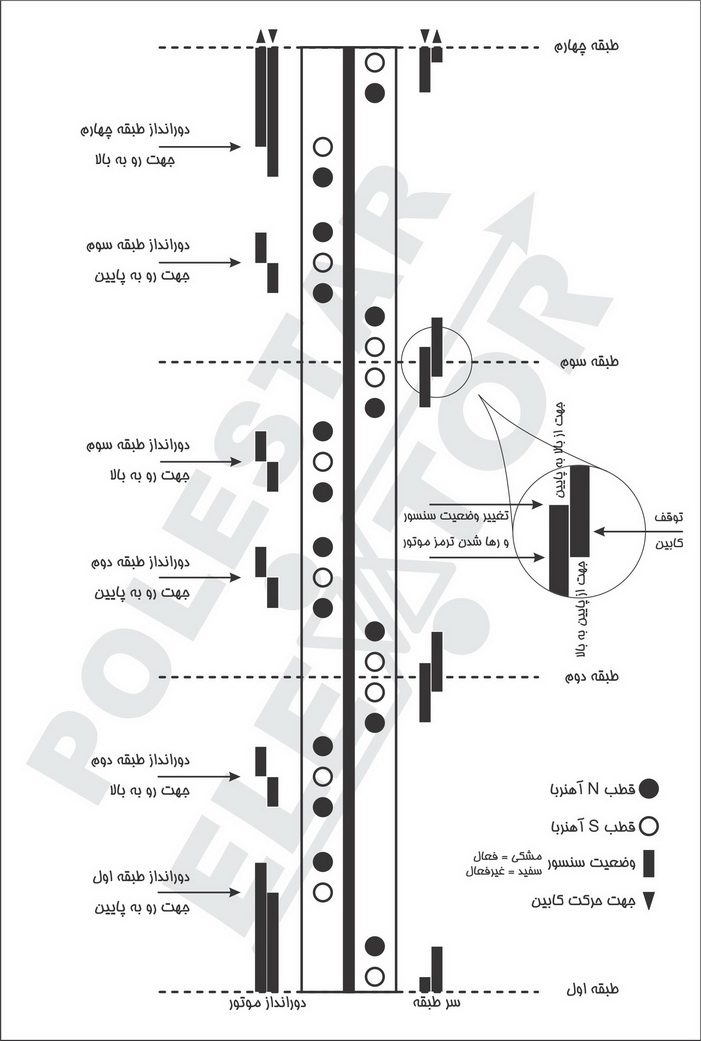
حسگرها قفل شونده (Latch) دارای این ویژگی است که یا مجاورت در برابر یکی از قطب های مغناطیسی به طور مثال S وصل شده، در صورت مجاورت با قطب مخالف N دوباره قطع میشود ، در نتیجه در صورت عدم مجاورت برابر قطب مخالف همواره در حالت قبلی باقی می ماند.
نحوه چیدن آهنرباهای دورانداز و توقف
روش های تشخیص مکان کابین :
همواره یکی از قسمت های مهم کنترل آسانسور، تشخیص مکان کابین و توقف دقیق سر طبقه بوده و است که به شکل های متفاوتی امکان پذیر می باشد، هر چند که هم اکنون تعداد زیادی از این وسایل به طور کامل از یادها رفته است.
به طور کلی در دو دسته قرار می گیرند :
1. روش های مقایسه ای یا ن
2. روش های مطلق
در روش مقایسه ای عمل تشخیص مکان کابین به کمک یک یا چند موقعیت مبنا انجام می پذیرد. به عبارت دیگر به کمک حسگرهای مختلف، تفاوت فاصله بین مکان فعلی و یک موقعیت ثابت محاسبه شده، مکان هر لحظه سوژه (کابین) به دست می آید.
به طور مثال در روش حسگرهای مغناطیسی روی کابین، پس از شناسایی مکان که در ابتدای کار انجام می شود، هر لحظه با شمارش پالس های دریافتی از چاه ، مکان کابین اصلاح می گردد. در این روش صحت عر عدد به صحت عدد به دست آمده قبلی بستگی دارد.
در روش دوم تشخیض مکان هر لحظه به کمک تعدادی موقعیت های ثابتدر طول مسیر حرکت کابین انجام می شود که در برخی از موارد این موقعیت ها محدود و در برخی نامحدود ( تعداد بسیار زیاد) می باشد.
به طور مثال در روش لیمیت سوئیچ طبقات برای هر طبقه یک لیمیت سوئیچ د نظر گرفته می شود که در محل طبقه قرار گرفته، مربوط به همان یک طبقه است. در این روش اعداد به دست آمده استقلال داشته، در صورت بروز خطا، با خواندن عدد بعدی خطا حذف می شود.
| ردیف | نوع روش | مطلق | مقایسه ای |
1 |
انواع سلکتور | ||
2 |
لیمیت سوئیچ و سوئیچ آدمکی | ||
3 |
مگنت سوئیچ و حسگر مدادی | ||
4 |
ماورای صوت | ||
5 |
شفت انکودر | ||
6 |
نوار |
- در صورت نصب تجهیزات ردیف 3 بر روی کابین ، روش مقایسه ای و در صورت نصب بر روی کابین روش مطلق ایجاد می شود.
- اهمیت توقف دقیق سر طبقه
همواره در کنار روش های مختلف دوراندازی، توقف سر طبقه یا LEVELING از اهمیت زیادی برخوردار بوده است، زیرا پس از هر بار توقف کابین در سر طبقه مسافرینیا بار داخل کابین شده، یا از آن خارج می شوند.
درصورت بروز هر گونه مشکل، که از توقف دقیق کابیم در سر طبقه جلوگیری کند، این ورود و خروج دچار اختلال شده و موجب نارضایتی و در مواردی آسیب رسیدن به مسافرین یا بار خواهد شد.
روش های قدیمی
1. روش سلکتور رله ای :
از قدیمی ترین روش های تشخیص مکان کابین، سلکتور رله ای می باشد.
در این روش به کمک پالش هایی که از یک حسگر (سوئیچ) نصب شده بر روی کابین (درحال حرکت در دو جهت) دریافت می شود، یک سلکتور به جرخش در می آِید و مکان کابین را در حاظه ی خود نگهداری می کند. این روش با خاموش و روشن شدن برق تابلوی کنترل، حافظه مکان کابین پاک نمی شود. قابل ذکر است در این روش اگر کابین در حالت خاموش بودن تابلوی کنترل، حرکت داده شود (در شزایظ نجات اضطراری) موقعیت خود را گم می کند.
2. روش سلکتور ایستاده :
روش دیگر بدین ترتیب است که حرکت کابین توسط سیم بکسل و یا زنجیر به گیربکس کوچکی در موتورخانه منتقل شده، باعث به حرکت در آمدن یک محور عمودی می شود. این محور دارای دنده بوده، یک مهره بر روی آن قرار دارد که باعث چرخش در آمدن محور به سمت بالا و پایین حرکت می کند.
بر روی مهره و همچنین بر روی بدنه این وسیله ، تعدادی کنتاکت قرار دارد که با به حرکت در آمدن مهره مزبور، به هم برخورد کرده، پالس هایی را برای تحریک تابلوی فرمان ایجاد می نماید.
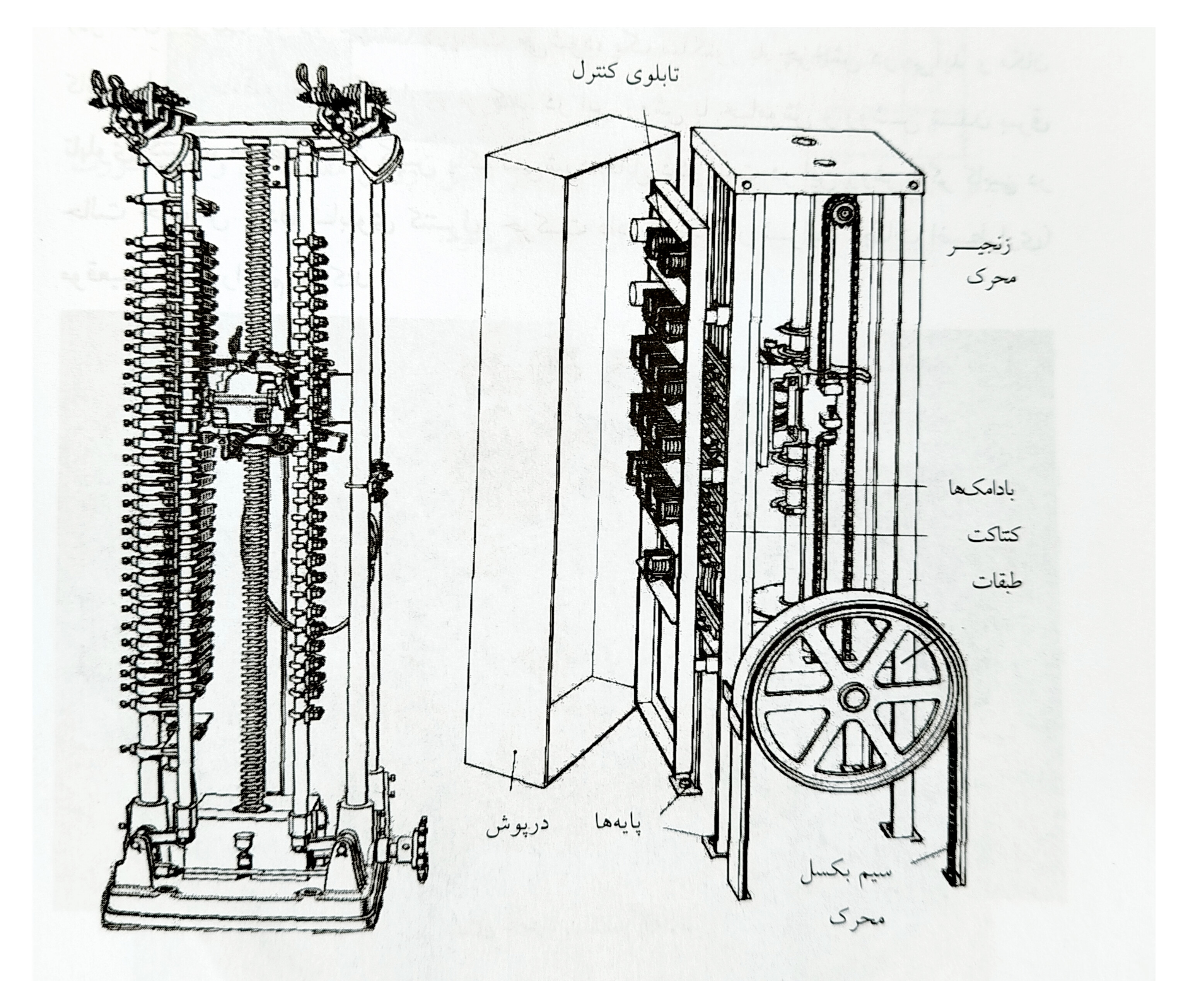
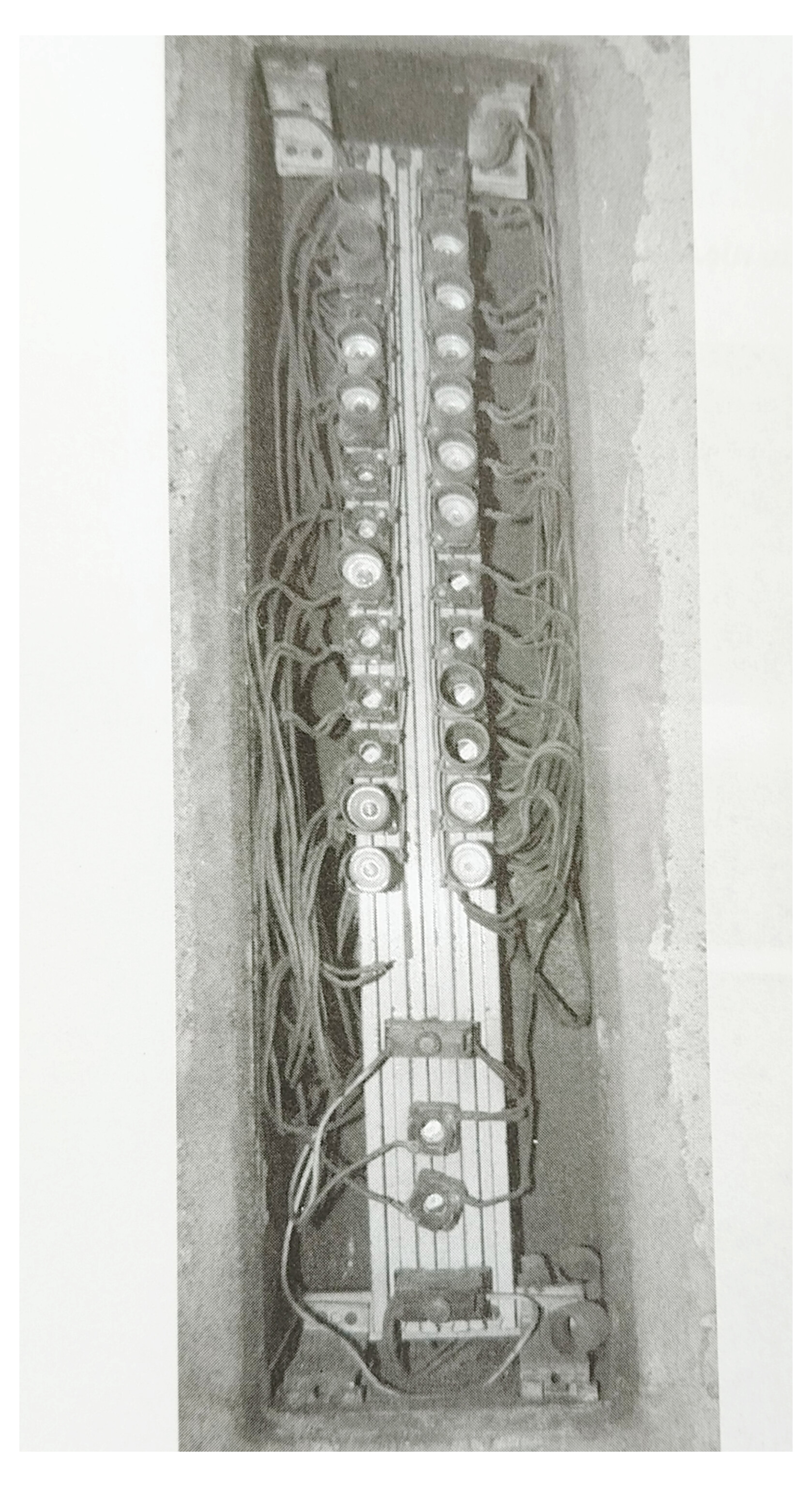
3. روش بادامکی
در این روش نیز مانند روش های قبلی، حرکت کابین توسط زنجیر به یک فلکه کوچک در موتورخانه منتقل شده، با چرخش فلکه یک محور طولانی در پشت تابلوی کنترل به چرخش در می آید. با به چرخش در آمدن محور، بادامک های متصل به آن چرخیده در نهایت میکروسوئیچ های طبقات را قطع و وصل می نماید.

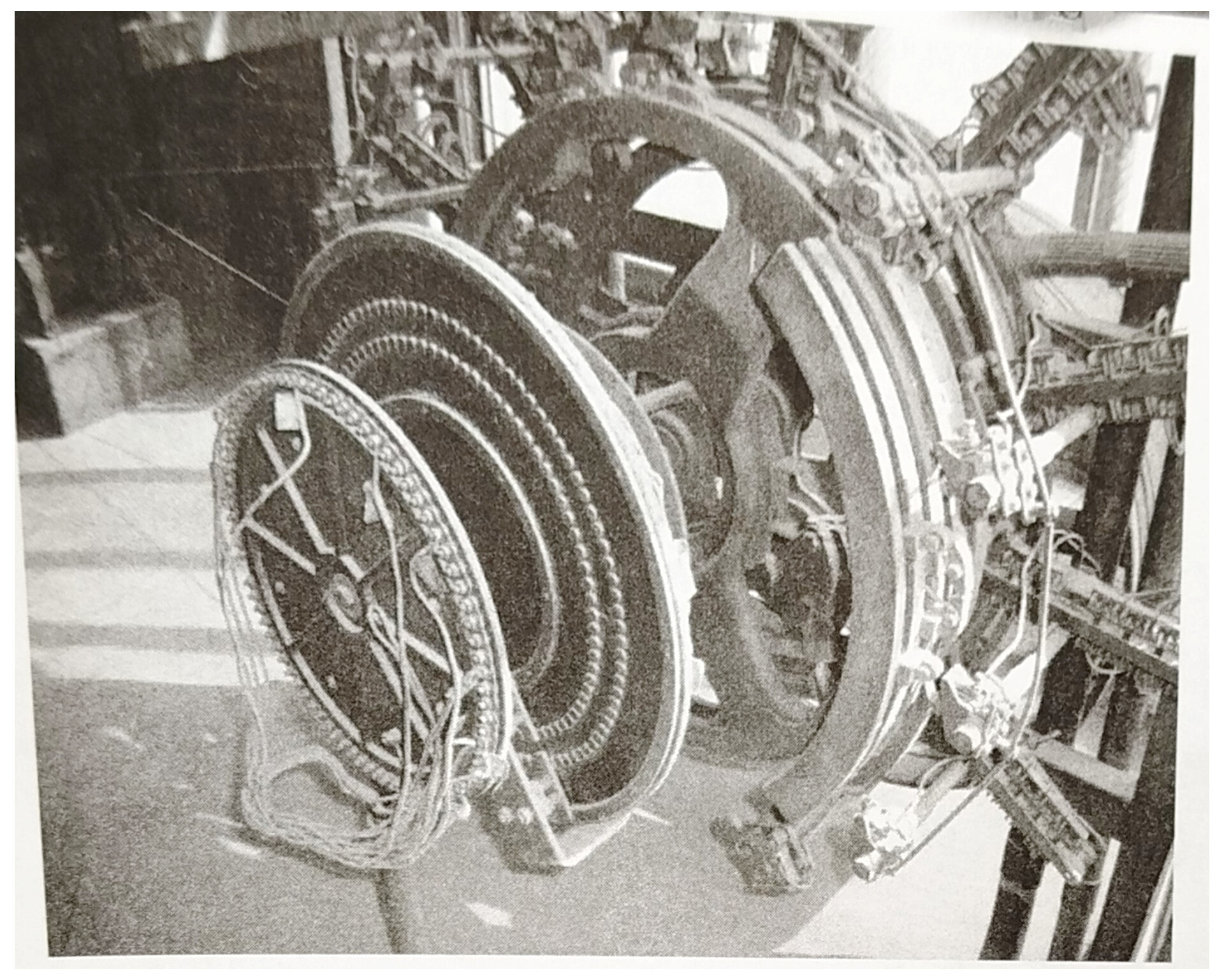
4. روش فلکه ای
در این روش یک فلکه به قطر تقریبی 60 سانتی متر در موتورخانه نصب می شود. قسمت گردنده این فلکه توسط سیم بکسل یا زنجیر به کابین متصل شده حرکت کابین زا به آن منتقل می کند. در محیط این فلکه میکروسوئیچ های کوچکی نصب و بر روی قسمت متحرک فلکه بادامک های قابل تنظیم نصب میشود.


کاهش سیم طبقه :
همانطور که پیش تر اشاره شد به طور معمول از هر شسای طبقه تا تابلوی کنترل سیم کشی جداگانه ای انجام می پذیرد. تعداد این سیم ها قابل محاسبه است و به طور مثال تا n طبقه از جدول زیر به دست می آید :
| ردیف | نام | نام ترمینال تابلو | تعداد |
1 |
مشترک نمراتور | +24 | 1 |
2 |
نمراتور | a,b,c,d,e,f,g,h | A |
3 |
مشترک شستی | G22 | 1 |
4 |
برگشت شستی | Hn | n |
| جمع | n + 10 |
این سیم کشی های متعدد که با افزایش تعداد طبقات ساختمان ( آسانسور ) به تعداد آن افزوده می شود ، موجب تراکم سیم کشی و دشواری خدمات در آینده میگردد.
اما با به کار بردن سیستم کاهش سیم طبقه، تعداد سیم های ارتباطی برای همه شستی ها تا تابلوی کنترل به 4 عدد کاهش می یابد. به عبارت دیگر فقط 4 عدد سیم، هم شستی ها به تابلوی کنترل متصل می شوند، هم سیگنال های دیگر مانند نمراتور درجه حرارت ، افت ولتاژ و ... به ترمینال های مربوطه در تابلو ارتباط می یابند. این امر به کمک فناوری ارتباط سریال میسر می شود.
سیستم احضار از راه دور :
در ساختمان هایی که افراد معلول جسمی رفت و آمد میکنند، این مشکل وجود دارد که پس از حضور آن ها مقابل درب آسانسور و فشار دادن شستی احضار ، کابین با تاخیر به دلیل عملکرد عادی آسانسور به آن طبقه می رسد و این مسئله موجب نارضایتی افراد معلول میگردد. برای حل این مشکل میتوان از یک شستی احضار از راه دور ، به طور مثال تا برد 30 سانتی متر استفاده نمود.
بدین ترتیب فرد ممعلول پیش از رسیدن به درب آسانسور با فشار دادن شستی احضار از راه دور که در اختیار دارد کابین را احضار کرده، زمان توقف او در مقابل آسانسور به حداقل می رسد.
با نگرشی به عملکرد شستی احضار از راه دور میتوان این سیستم را برای کاربردهای دیگر نیز تعمیم داد. به طور مثال در ساختمان هایی که توسط آسانسور، میزهای آزمایشگاهی، اسباب و اثاثیه مسافران و ... جابجا می شود، میاولن از یک سیستم احضار از راه دور به همراه شستی های DC , DO استفاده نمود.


شستی احضار
در هر طبقه علاوه بر یک نمایشگر مکان کابین (نمراتور) یک شستی فشاری با کنتاکت باز (NO) برای احضار کابین به آن طبقه در نظر گرفته شده است. ترمیال مشترک این شستی ها در همه طبقات به هم وصل شده سیم برگشت هر طبقه نیز با عبور از داکت هایی که در چاه برای همین منظور نصب شده اند. به ترمینال مربوطه با همان نام (C1,C2...H1,H2...) در تالوی کنترل نتصل می شود. به طور مثال سیم برگشتی از شستی طبقه 5 کابین، به ترمینال C5 تابلوی کنترل و سیم برگشتی از شستی طبقه 3 به ترمینال H3 متصل میگردد.

طبق استاندارد فاصله نصب شستی های احضار از کف طبقه بین 90 تا 110 سانتی متر و در کابین بین 90 تا 140 سانتی نتر می باشد.
انواع شستی احضار :
شستی ها معمولا از نوع کنتاکی و فشاری هستند، اما در برخی از موارد از انواع لمسی یا سایه ای هم استفاده می شود. در مدل سایه با نزدیک شدن انگشت به قسمتی از صفحه شستی دستر لازم صادر می شود. دو عدد لامپ یا LED به زنگ سبز و قرمز نیز در شستی وجود دارد که جهت حرکت کابین را نمایش می دهدو فرمان این لامپ های جهت از تابلوی کنترل صادر می شود.
یکی از مشکلات آسانسورهای مرتفع، تعداد زیاد شستی های احضار آن در داخل کابین می باشد به طوری که اولا تعداد سیم های تراول کابل را افزایش داده که خود موجب افزایش قیمت ، وزن و دشواری در خدمات بعدی می شود. دوما بر روی تزئینات داخلی کابین نیز تاثیر منفی میگذارد.
برای رفع مشکل نخست، میتوان از سیستم های کاهش سیم کابین استفاده نمود. برای برطرف نمودن مشکل دوم نیز می توان از صفحه کلید ماتریسی( تلفنی) و یا کارت های بدون تماس استفاده نمود.
در برخی از موارد نیز برای رفاه حال افراد نابینا یا کم بینا از علائم ویژه بر روی شستی های احضار استفاده میشود. در ضمن برای آن که فرد متوجه پذیرفتن شستی مربوطه یشود یک آلارم صوتی کوتاه پخش شده یا در شستی یک لرزش کوچک به وجود می آید.