روش های تشخیص مکان کابین :
همواره یکی از قسمت های مهم کنترل آسانسور، تشخیص مکان کابین و توقف دقیق سر طبقه بوده و است که به شکل های متفاوتی امکان پذیر می باشد، هر چند که هم اکنون تعداد زیادی از این وسایل به طور کامل از یادها رفته است.
به طور کلی در دو دسته قرار می گیرند :
1. روش های مقایسه ای یا ن
2. روش های مطلق
در روش مقایسه ای عمل تشخیص مکان کابین به کمک یک یا چند موقعیت مبنا انجام می پذیرد. به عبارت دیگر به کمک حسگرهای مختلف، تفاوت فاصله بین مکان فعلی و یک موقعیت ثابت محاسبه شده، مکان هر لحظه سوژه (کابین) به دست می آید.
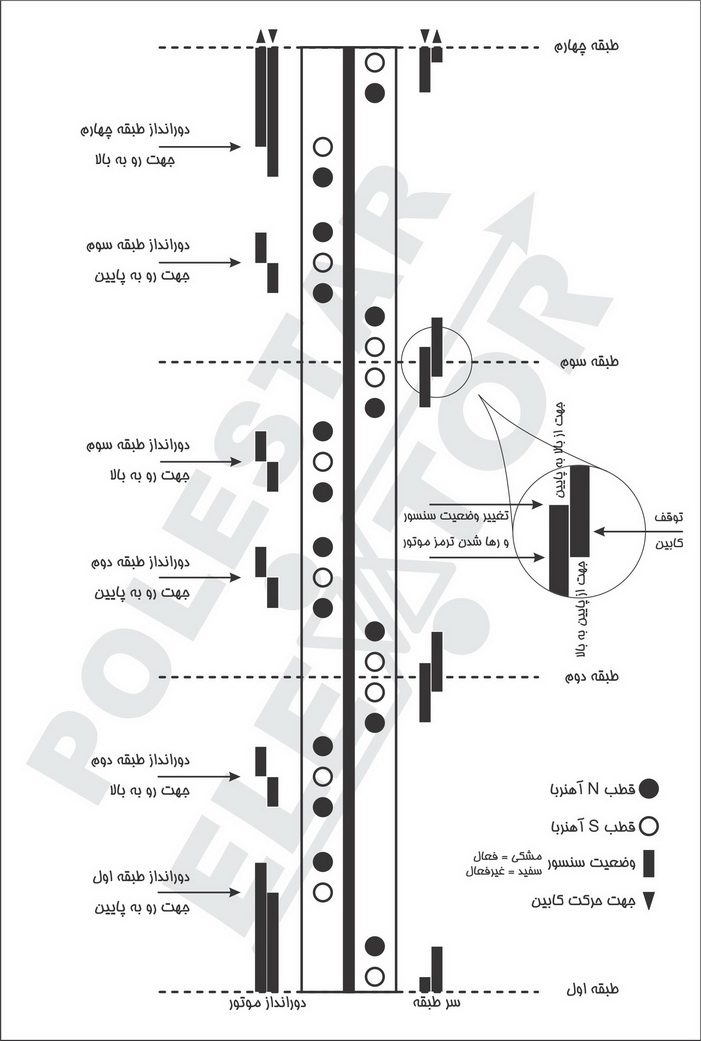
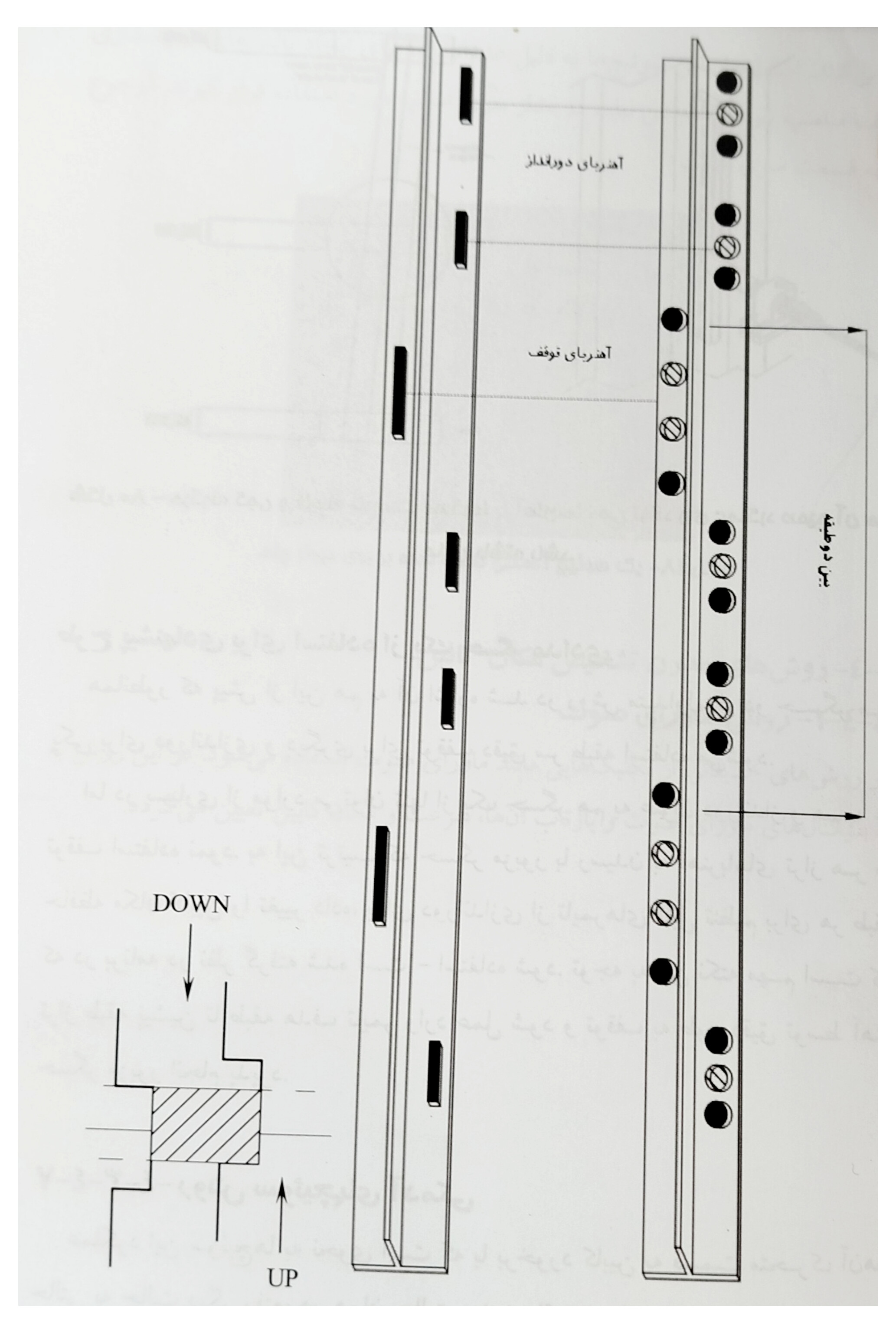
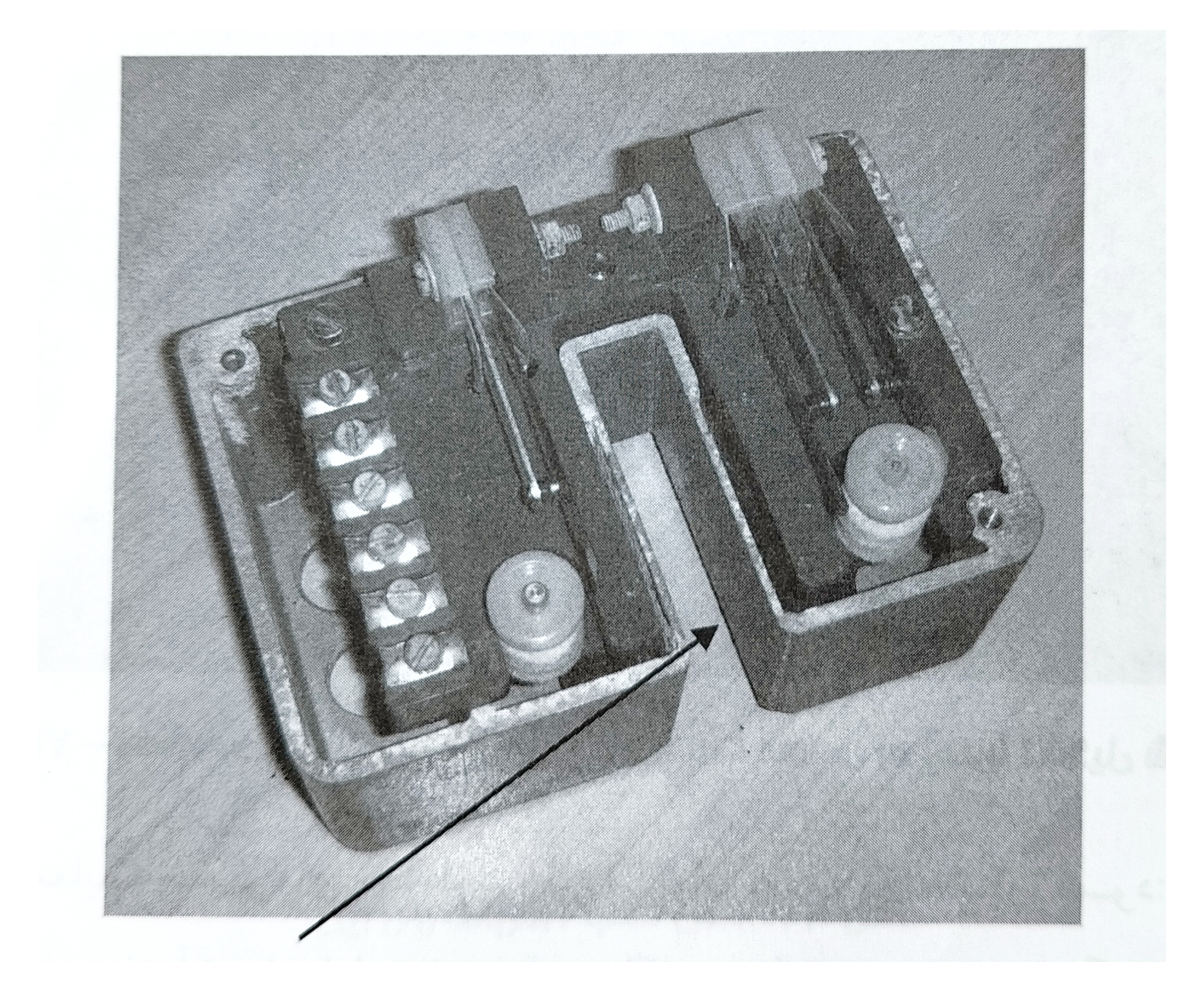
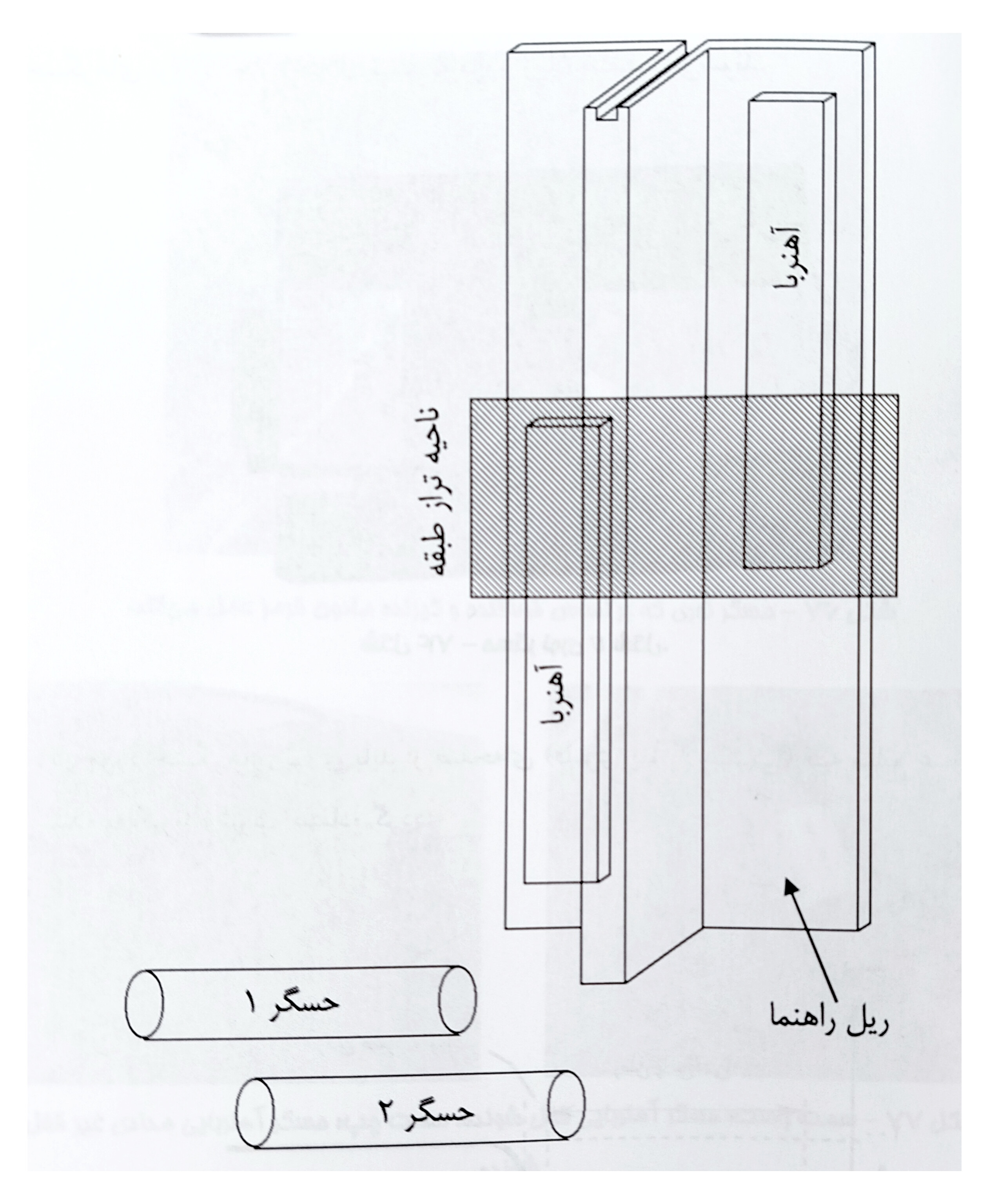
به طور مثال در روش حسگرهای مغناطیسی روی کابین، پس از شناسایی مکان که در ابتدای کار انجام می شود، هر لحظه با شمارش پالس های دریافتی از چاه ، مکان کابین اصلاح می گردد. در این روش صحت عر عدد به صحت عدد به دست آمده قبلی بستگی دارد.
در روش دوم تشخیض مکان هر لحظه به کمک تعدادی موقعیت های ثابتدر طول مسیر حرکت کابین انجام می شود که در برخی از موارد این موقعیت ها محدود و در برخی نامحدود ( تعداد بسیار زیاد) می باشد.
به طور مثال در روش لیمیت سوئیچ طبقات برای هر طبقه یک لیمیت سوئیچ د نظر گرفته می شود که در محل طبقه قرار گرفته، مربوط به همان یک طبقه است. در این روش اعداد به دست آمده استقلال داشته، در صورت بروز خطا، با خواندن عدد بعدی خطا حذف می شود.
انواع روش های تشخیص مکان
| ردیف |
نوع روش |
مطلق |
مقایسه ای |
1 |
انواع سلکتور |
 |
|
2 |
لیمیت سوئیچ و سوئیچ آدمکی |
|
|
3 |
مگنت سوئیچ و حسگر مدادی |
|
|
4 |
ماورای صوت |
|
|
5 |
شفت انکودر |
|
|
6 |
نوار |
|
|
- در صورت نصب تجهیزات ردیف 3 بر روی کابین ، روش مقایسه ای و در صورت نصب بر روی کابین روش مطلق ایجاد می شود.
- اهمیت توقف دقیق سر طبقه
همواره در کنار روش های مختلف دوراندازی، توقف سر طبقه یا LEVELING از اهمیت زیادی برخوردار بوده است، زیرا پس از هر بار توقف کابین در سر طبقه مسافرینیا بار داخل کابین شده، یا از آن خارج می شوند.
درصورت بروز هر گونه مشکل، که از توقف دقیق کابیم در سر طبقه جلوگیری کند، این ورود و خروج دچار اختلال شده و موجب نارضایتی و در مواردی آسیب رسیدن به مسافرین یا بار خواهد شد.
روش های قدیمی
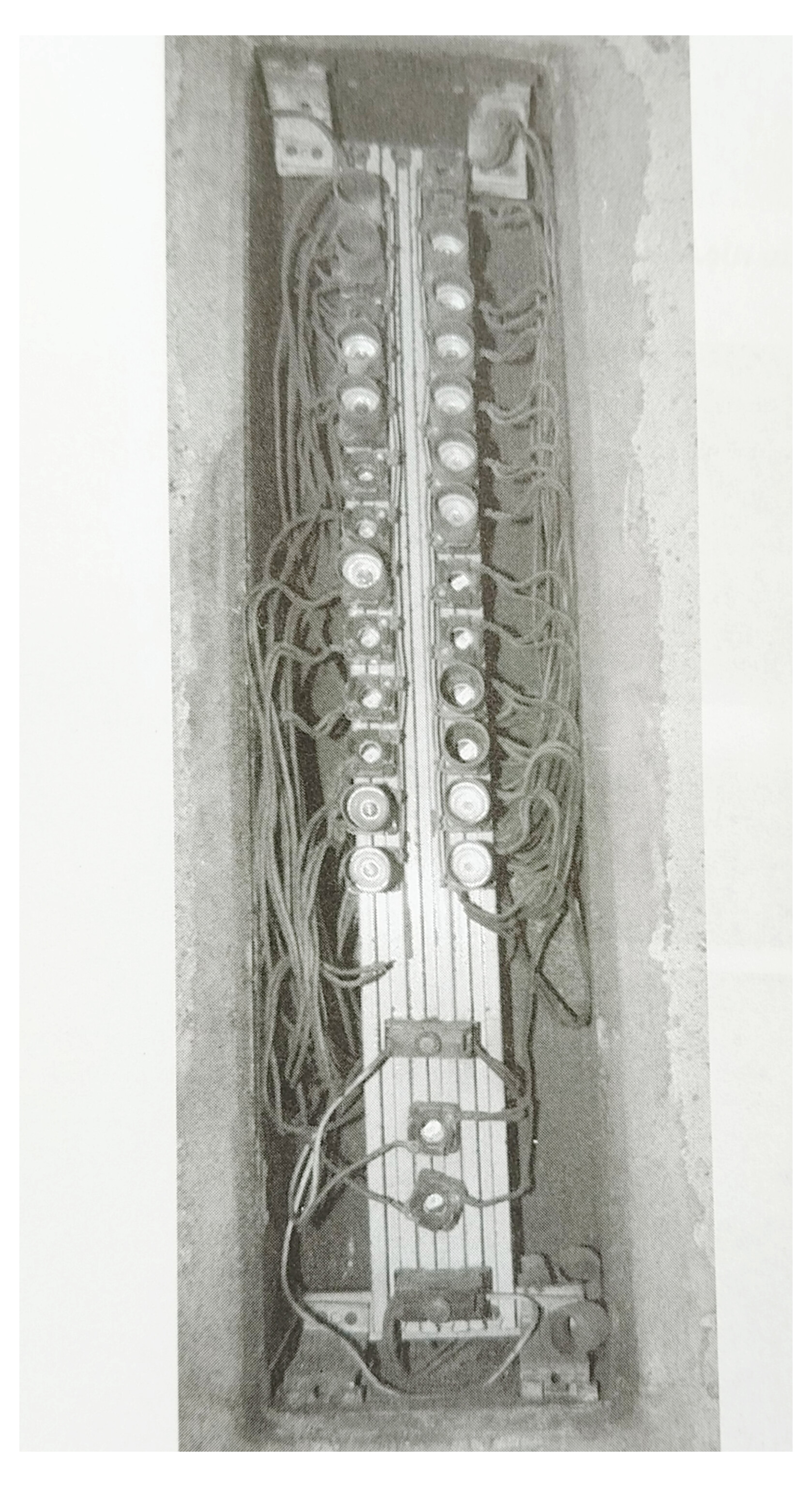
1. روش سلکتور رله ای :
از قدیمی ترین روش های تشخیص مکان کابین، سلکتور رله ای می باشد.
در این روش به کمک پالش هایی که از یک حسگر (سوئیچ) نصب شده بر روی کابین (درحال حرکت در دو جهت) دریافت می شود، یک سلکتور به جرخش در می آِید و مکان کابین را در حاظه ی خود نگهداری می کند. این روش با خاموش و روشن شدن برق تابلوی کنترل، حافظه مکان کابین پاک نمی شود. قابل ذکر است در این روش اگر کابین در حالت خاموش بودن تابلوی کنترل، حرکت داده شود (در شزایظ نجات اضطراری) موقعیت خود را گم می کند.
2. روش سلکتور ایستاده :
روش دیگر بدین ترتیب است که حرکت کابین توسط سیم بکسل و یا زنجیر به گیربکس کوچکی در موتورخانه منتقل شده، باعث به حرکت در آمدن یک محور عمودی می شود. این محور دارای دنده بوده، یک مهره بر روی آن قرار دارد که باعث چرخش در آمدن محور به سمت بالا و پایین حرکت می کند.
بر روی مهره و همچنین بر روی بدنه این وسیله ، تعدادی کنتاکت قرار دارد که با به حرکت در آمدن مهره مزبور، به هم برخورد کرده، پالس هایی را برای تحریک تابلوی فرمان ایجاد می نماید.
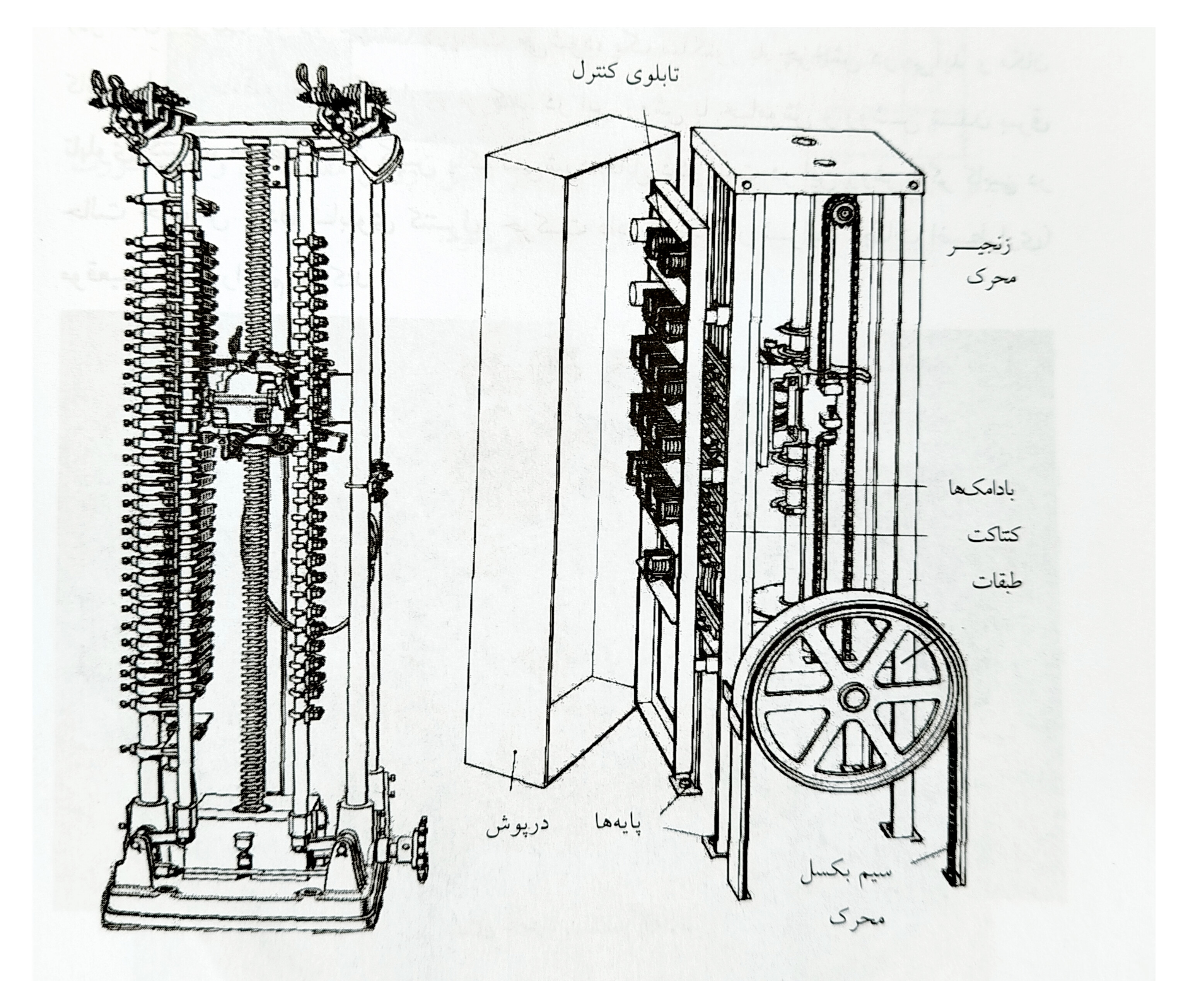
3. روش بادامکی
در این روش نیز مانند روش های قبلی، حرکت کابین توسط زنجیر به یک فلکه کوچک در موتورخانه منتقل شده، با چرخش فلکه یک محور طولانی در پشت تابلوی کنترل به چرخش در می آید. با به چرخش در آمدن محور، بادامک های متصل به آن چرخیده در نهایت میکروسوئیچ های طبقات را قطع و وصل می نماید.

4. روش فلکه ای
در این روش یک فلکه به قطر تقریبی 60 سانتی متر در موتورخانه نصب می شود. قسمت گردنده این فلکه توسط سیم بکسل یا زنجیر به کابین متصل شده حرکت کابین زا به آن منتقل می کند. در محیط این فلکه میکروسوئیچ های کوچکی نصب و بر روی قسمت متحرک فلکه بادامک های قابل تنظیم نصب میشود.